سیستم برداشت رباتیک برای بادنجان یا بادمجان
جمعه, ۱۳ بهمن ۱۳۹۱، ۰۱:۲۴ ب.ظ
خلاصه
واریته هدف و روش پرورش
عملیات برداشت برای بادنجان ها پیچیده است و برای کمی کمتر از 40 درصد کل ساعت های کاری تخمین زده شده است. برای عملیات برداشت خودکار، یک ربات هوشمند که می تواند کار نیروی انسانی ای که لازم است را تقلید کند. این مقاله توسعه یک سیستم ربات برداشت که وظایف تشخیص، رسیدن و چیدن را انجام می دهد را توضیح میدهد. به منظور انجام این وظایف، سه جزء حیاتی توسعه داده شدند. ابتدا یک الگوریتم ماشین بینایی، که یک عمل جداسازی رنگ و یک عمل تقسیم بندی عمودی را با هم ترکیب می کند، توسعه داده شد. الگوریتم می توانست تحت حالت های متفاوت نور زوج میوه را تشخیص دهد. سپس، یک مدل کنترل فازی پس خور بصری برای بکار انداختن یک بازوی مکانیکی کننده طراحی شد. مدل کنترل، انتهای بازوی مکانیکی کننده را قادر به رسیدن به میوه از فاصله 300 میلی متری می کرد. به علاوه، یک عملگر نهایی متشکل از یک مکانیزم چنگالی گرفتن میوه، یک مکانیزم تشخیص اندازه و یک مکانیزم برش ساقه توسعه داده شده است. این نیروی لازم را برای چنگ زدن میوه و برش ساقه سفت را مهیا میکند. در آخر، سه جزء حیاتی به طور وابسته ای و تابعی با هم ترکیب شده اند و یک آزمایش برداشت مقدماتی در آزمایش گاه برای تخمین کارایی سیستم انجام شد. سیستم، یک نسبت برداشت موفق 5/62 درصد را نشان می دهد، اگر چه عملگر نهایی ساقه را در یک موقعیت اندکی مرتفع برای بستر میوه می برد. مدت زمان اجرا برای برداشت یک بادنجان 1/64 ثانیه بود.

مقدمه میوه های سبزیجاتی مثل بادنجان ها، بعد از رسیده بودن میوه ها به انتخاب کارگر با دقت برداشت می شوند تا آسیب نبینند. کارگر از روی مشاهدات، با حساب رشد گیاه، گرایش فروش، ویژگی های واریته ای و غیره، رسیدگی را تخمین می زند. از اینرو، این برای ماشین های کشاورزی قراردادی برای اجرا مثل فرد هوشمند مشکل است، عملیات برداشت توسط دست در حال حاضر هدایت شده است و کاملا مکانیزه نیست. طبق گزارش آماری، کل ساعات کار برای تولید بادنجان در ژاپن حدود 200 ساعت است و عملیات برداشت برای کمی کمتر از 40 درصد تخمین زده می شود. کل ساعت کاری حدود 50 برابر زمان تولید مکانیزه برنج در ژاپن با استفاده از یک تراکتور، یک کارنده برنج، یک کمباین با هد تغذیه ای و ... است. به علاوه، کسری از زارعین دچار مشکلات جدی ای به علّت تمرکز جمعیت در مراکز شهری وابسته با صنعتی سازی شده اند. تحت اینچنین اوضاعی، این برای ژاپن حیاتی است تا سیستم عملیاتی مکانیزه برای تأمین سبزیجات مطمئن توسعه یابد. طبق یک روند مکانیزاسیون، مطالعات ابتدایی روی برداشت رباتیک با استفاده از تکنولوژی پیشرفته هستند. با توجه به تولید سبزیجات، یک سیستم پایه برای برداشت گوجه در سال 1980 توسعه داده شد. پس از آن، سیستم های رباتیک برای برداشت خیار، گوجه گیلاسی و توت فرنگی توسعه داده شد. تکنولوژی ماشین بینایی برای کشف میوه در برداشت رباتیک استفاده شده است. هر چیدنی نیاز به یک الگوریتم ماشین بینایی تشخیصی دارد. نظر به برداشت رباتیک بادنجان، ماشین بینایی مجبور به تشخیص میوه از ساقه و برگ ها که آنها شباهت رنگی با میوه دارند است. علاوه بر این، تشخیص اندازه میوه نیز لازم است. این کار مربوط به عملگر نهایی است.عملگر نهایی بایست میوه را به صورت امن بگیرد و ساقه سفت را ببرد.
در این مطالعه، عملیات برداشت یک نیروی انسانی به سه وظیفه تقسیم می شود؛ یعنی، تشخیص، رسیدن (نزدیک شدن) و چیدن. سپس این وظایف با استفاده از یک واحد ماشین بینایی، یک واحد کنترل بازوی مکانیکی و واحد عملگر نهایی اجرا می شوند. سیستم برداشت روباتیک با ترکیبی از اجزاء این سیستم توسعه یافته است. اگر توسعه ماشین کشاورزی هوشمندی میتوانست به عملیات مدیریت چیدن پیچیده مثل آموزش، آراستن و ...، سیستم آسان کشاورزی شاید سرانجام به توسعه برسد. به علاوه، این می تواند راه را برای توسعه سیستم های جهانی تولید سبزیجات صاف کند.
واریته هدف و روش پرورش
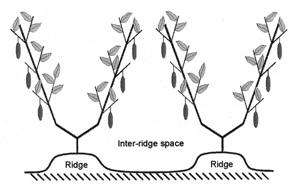
خیلی از واریته های محلی بادنجان ها در ژاپن پرورش و به صورت گسترده کشت می شوند. اندازه و شکل های به طور نسبتاً زیادی نوسان دارند. در میان واریته ها، آنهایی که اندازه متوسط دارند عموماً، همراه با سیر تکنولوژی حمل و نقل و استفاده سودمند از هیبرید های «F1» در فروشگاه هستند. بنابراین، واریته اندازه متوسط « سنریو-2 » در این مطالعه استفاده شده است. بادنجان ها معمولاً در خاک بیرون یا در گلخانه کشت می شوند. کشت بدون خاک نیز مطالعه شده است. برای مقدمات برداشت رباتیک، تولید در یک گلخانه بنظر می رسد مناسب باشد زیرا نیرو و محیط خاک ناپذیری در دسترس است. ضمناً، تکنیک پرورش بادنجان، از محیط به محیط در ژاپن متفاوت است. روش پرورش «V» شکل، در شکل 1 نشان داده شده است. کاملاً شناخته شده است و میوه را قادر می سازد که رو به راهرو باشد. بنابراین، سیستم برداشت رباتیک طراحی شده برای حرکت ما بین فضای میانی در روش پرورش «V» شکل در گلخانه طراحی شده است.
روش پرورش «V» شکل
توسعه سیستم برداشت رباتیک
اجزای سیستم
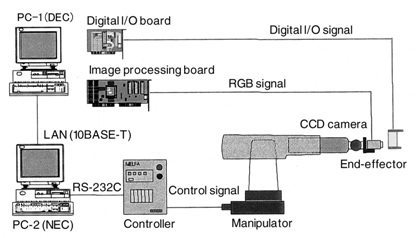
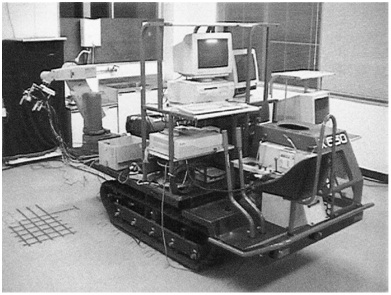
سیستم برداشت رباتیک متشکل از یک واحد ماشین بینایی، یک واحد بازوی مکانیکی و یک واحد عملگر نهایی؛ طبق شکل 2 است. نمایش عمومی در شکل 3 است. واحد ماشین بینایی (دوربین CCD، برد پردازش تصویر و یک رایانه)، مطابق با چشمان انسان وظیفه کشف میوه از یک تصویر را انجام می دهد. واحد بازوی مکانیکی (بازوی مکانیکی، کنترل کننده و رایانه)، مطابق بازوی انسان وظیفه نزدیک شدن به میوه را انجام می دهد. بازوی مکانیکی مفصلی با 5 درجه آزادی ای که به طور گسترده برای مونتاژ قطعات در یک کارخانه استفاده می شود؛ انتخاب شده است. به علاوه، واحد عملگر نهایی (عملگر نهایی و برد ورودی خروجی)، مطابق دست انسان وظیفه چیدن میوه را انجام می دهد. دوربین CCD در مرکز عملگر نهایی متصل شده است. اجزای سیستم به شبکه هم متصل شده اند.
الگوریتم ماشین بینایی برای کشف میوه بادنجان بر اساس مشخصات رنگ و خصایص ریختی پایه ریزی شده است. شکل 4 طرز کار پردازش تصویر را نشان می دهد. پیش از هر کار دیگری، تصویر اصلی (شکل 4-a) گرفته شد، و پیکسل های سطح پایین خاکستری با استفاده از مشخصات رنگی که توسط آن روشنی میوه به صورت نسبتاً کم با روشنی باقی قطعات مقایسه میشود، بخش بخش شد (شکل 4-b). در اینجا، چون که تعدادی از قطعات برگ ها و ساقه ها می توانست با اشتباه در این پروسه کشف شود، خصایص ریختی بادنجان ها استفاده شد. مختصراً، بخش طولانی عمودی به همان اندازه قطعه میوه شناسایی شد. بنابراین، تصویر بخش بندی شده به صورت عمودی با یک عمل منطقی (AND) با 2 الگو (شکل 4-c، d) تقسیم بندی شده است و به صورت عمودی مورد های تقسیم بندی شده (شکل 4-e، f) بدست آمدند. موارد با یک سطح حداکثر (شکل 4-g، h) خارج از موارد تقسیم بندی شده عمودی برای حذف موارد کوچک باقی مانده اند. یک عمل منطقی (AND) میان این دو تصویر انجام می شود، چنانکه چند خط دراز بدست می آید (شکل 4-i). در آخر این خطوط توسط یک عمل آماسی به هم متصل می شوند، و مورد انتهایی به عنوان میوه شناسایی می شود (شکل 4-j).
شکل 5 مثال هایی از پردازش تصویر را نشان می دهد. این مورد تأیید است که الگوریتم می تواند تحت شرایط متفاوت نور استفاده شود، هر چند الگوریتم یک تکه از میوه را در مورد حالات نور مستقیم خورشید کشف کرده است.
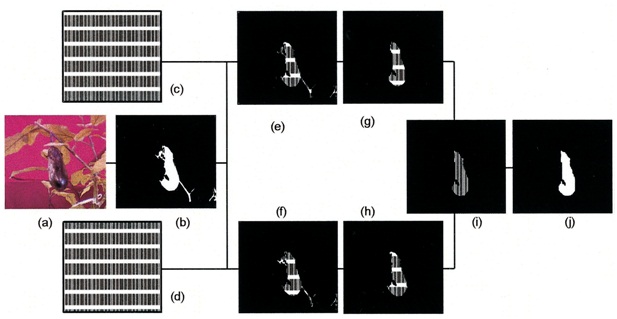
ماشین بینایی برای کشف بادنجان (a): تصویر اصلی، (b): پیکسل های سطح پایین خاکستری، (c): الگوی اول، (d): الگوی دوم (e): تقسیم بندی عمودی تصویر با استفاده از الگوی اول، (f): تقسیم بندی عمودی تصویر با استفاده از الگوی دوم، (g): حداکثر سطح مورد، (h): حداکثر سطح مورد، (i): خطوط طویل عمودی، (j): میوه کشف شده
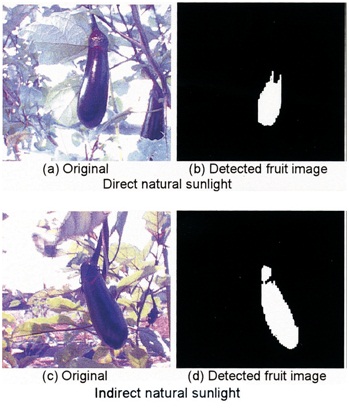
نمونه های پردازش تصویر تحت تابش نور طبیعی خورشید (فاصله دوربین: 400 میلی متر)
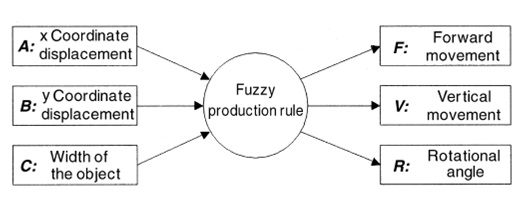
دیاگرام شماتیک از کنترل بازوی مکانیکی
راهنمای بازوی مکانیکی به سمت میوه توسط منطق فازی
بعد از کشف میوه توسط واحد ماشین بینایی، بازوی مکانیکی با استفاده از اطلاعات ماشین بینایی به میوه نزدیک می شود. یک منطق فازی برای راهنمایی بازو اختیار شد، از آنجایی که الگوریتم ماشین بینایی همیشه تمام قسمت های میوه را شناسایی نخواهد کرد. بنابر این مدل کنترل فازی پس خور بصری نشان داده شده در شکل 6، برای تعیین حرکت رو به جلو، حرکت عمودی و زاویه چرخش بازوی مکانیکی مبنی بر موقعیت کشف میوه در قاب تصویر طراحی شد. نتیجتاً، انتهای بازوی مکانیکی آنچنانکه ناحیه هدف (بخشی حول حداکثر قطر) در مرکز قاب تصویر مکان یابی شده است، به میوه می رسد. سطح میوه کشف شده با رسیدن عملگر نهایی افزایش یافته است. زمانی که سطح 70 درصد پیکسل های تصویر را اشغال کرد، سیستم نزدیک شدن را طبق رسیدن بازوی مکانیکی به میوه متوقف می کند.
عملگر نهایی برداشت
عملگر نهایی برداشت یکی از مهمترین ابزار برای برداشتن میوه بعد از رسیدن انتهای بازو به میوه است. این متشکل از یک مکانیزم چنگال میوه، یک مکانیزم تشخیص اندازه، و یک مکانیزم ساقه بر است. شکل 7 نمایش عمومی از عملگر نهایی را نشان می دهد. مکانیزم چنگال می تواند به صورت امن میوه را با چهار لاستیک محرک و دو تشک مکشی نگه دارد. مکانیزم تشخیص می تواند یک میوه را با اندازه ای بین 125 تا 185 میلی متر مبنی بر فاصله میان سنسور فتوالکتریک برای کشف قله میوه و میله های راهنما برای کشف پایه میوه انتخاب کند. مکانیزم برش، به علاوه، قادر به بریدن ساقه محکم است. همه مکانیزم ها با 4/0 مگا پاسکال هوای فشرده به حرکت می افتند.
پروسه برداشت
نرم افزار مجتمع، برای انجام عمل برداشت با ترکیب وظیفه ای اجزای سیستم توسعه داده شد. پروسه برداشت به این قرار است: ابتدا، انتهای بازوی مکانیکی به صورت عمودی، افقی و در جهت جلو سو توسط مدل کنترل فازی پس خور بصری کنترل می شود. بعد از اینکه انتهای بازوی مکانیکی به میوه رسید، سیستم شروع به وظیفه چیدن می کند. سنسور فتو الکتریک، متصل در زیر عملگر نهایی، برای تشخیص اینکه آیا این قله میوه را تشخیص داده است، بررسی می شود. عملگر نهایی سپس به سمت پایین یا بالا حرکت میکند تا قله میوه در جلوی سنسور فتو الکتریک بیاید و میوه چنگ زده شود. بازوی مکانیکی میوه را در یک زاویه 30 درجه با مرکز پایه میوه برای جدا کردن میوه از برگ های همجوار بلند میکند. میله های راهنما بسته می شوند و به سمت بالا کشو می شوند. زمانی که میله های راهنما به پایه میوه می رسند، آنها کشو شده به سمت بالا را متوقف می کنند. قیچی ها برای برداشت، نزدیک شده به ساقه جهت قطع استفاده می شوند. در انتها، میوه به یک حامل که در نزدیکی بازوی مکانیکی قرار گرفته است منتقل می شوند.
آزمایش برداشت مقدماتی
مواد و روش ها
آزمایش برداشت مقدماتی ای در آزمایشگاه با 40 نمونه برای تخمین کارایی بر حسب نسبت برداشت موفق، موقعیت برش، و مدت زمان اجرا هدایت می شود.
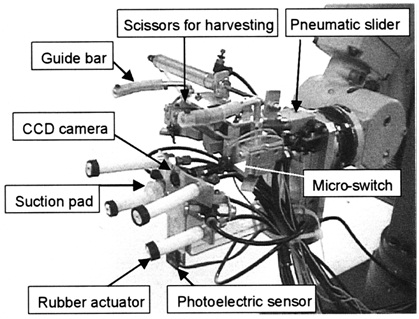
نمایش عمومی از عملگر نهایی برداشت
صحنه برداشت با عملگر نهایی
آزمایش مقدماتی برداشت
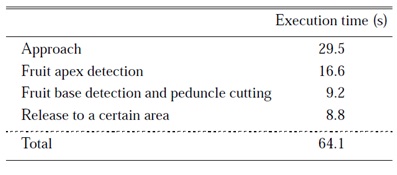
مدت زمان اجرا هر وظیفه در عمل برداشت مقدماتی
بادنجان ها (واریته: سنریو-2) کاشته شده در گلدان، در یک ارتفاع یک متر هرس شده و در پرورش «V» شکل قرار گرفته اند. میوه نمونه با یک اندازه 125 تا 185 میلی متر در مسافت 300 میلی متری از موقعیت اصلی بازوی مکانیکی قرار گرفته اند و نرم افزار تجمعی استفاده شده است. اینجا، برگ ها در جلوی میوه برای جلوگیری از مزاحمت مشاهدات بصری حذف شده اند . نور افشانی حول میوه حدود 450 تا 600 لوکس بود.
کارایی سیستم روباتیک
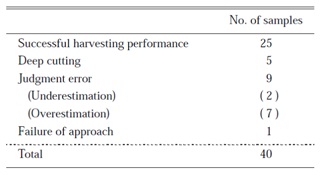
صحنه برداشت برای بادنجان با عملگر نهایی در شکل 8 و نتایج آزمایش برداشت مقدماتی در جدول 1 نشان داده شده است. سیستم می تواند 25 نمونه از 40 نمونه را با نسبت برداشت موفق 5/62 درصد برداشت کند. هرچند، در 5 نمونه، سیستم ساقه میوه را می برد (برش عمیق) و در 9 نمونه اندازه میوه بد تشخیص داده شده اند. این ناتوانی بیشتر به سبب کشف ناموفقیت پایه میوه بود که باید با استفاده از سنسوری نوری بهبود یابد. به علاوه، ناتوانی در رسیدن در یک نمونه رخ داد به دلیل اینست که الگوریتم ماشین بینایی میوه را در حین رسیدن کشف نکرد.
میانگین موقعیت برش ساقه 3/9 میلی متر بیشتر از پایه میوه در نمونه های با موفقیت برداشته شده بود. موقعیت برش به طور گسترده با جهت ساقه و قطر پایه میوه متفاوت بود. چون که بادنجان ها عموماً با یک ساقه کمتر از 5 میلی متر حمل می شدند، برای نیروی انسانی برش دوباره ساقه، نظر به استفاده مناسب سیستم در آینده، لازم خواهد بود.
به علاوه، جدول 2 زمان اجرای هر وظیفه در عمل برداشت مقدماتی برای نمونه های با موفقیت برداشت شده را نشان می دهد. یافته شد که سیستم برداشت رباتیک نیازمند 1/64 ثانیه برای برداشت بادنجان است. مخصوصاً، زمان اجرای تشخیص اندازه میوه، برای رسیدن و کشف قله میوه که اضافه شده است، 1/46 ثانیه بود و برای بیشترین زمان حساب شده است. سرعت بخشی این وظیفه شاید برای یک بهبودی عمده و با ارزش در کارایی سوق دهد. به علاوه، بیشتر مطالعات برای استفاده مفید سیستم شامل کنترل با یک وسیله سیار، افزایش تراکم سیستم و هم آهنگی با نیروی انسانی باید انجام شود.
نتیجه
عمل برداشت برای بادنجان ها پیچیده و نیاز به مقدار زمان زیادی دارد. طبق یک مطالعه اصولی برای مکانیزه کردن، سیستم برداشت رباتیک برای بادنجان با استفاده از تکنولوژی پیشرفته توسعه داده شده است. سیستم متشکل از یک واحد ماشین بینایی، یک واحد کنترل بازوی مکانیکی و یک واحد عملگر نهایی توسعه داده شده و می تواند به صورت خودکار عمل برداشت مقدماتی یعنی وظایف شناسایی، رسیدن و چیدن را اجرا کند. نسبت کارایی برداشت موقت 5/62 درصد است، اگر چه عملگر نهایی در یک موقعیت کمی مرتفع از پایه میوه ساقه را می برد. زمان اجرا برای برداشت یک بادنجان 1/64 ثانیه است. در نتیجه، طراحی اصولی برداشت رباتیک برای بادنجان ها توسعه داده شده و باید در توسعه تکنیک ها برای تولید مناسب سبزیجات شرکت داشته باشد.
اجزای سیستم
سیستم برداشت رباتیک متشکل از یک واحد ماشین بینایی، یک واحد بازوی مکانیکی و یک واحد عملگر نهایی؛ طبق شکل 2 است. نمایش عمومی در شکل 3 است. واحد ماشین بینایی (دوربین CCD، برد پردازش تصویر و یک رایانه)، مطابق با چشمان انسان وظیفه کشف میوه از یک تصویر را انجام می دهد. واحد بازوی مکانیکی (بازوی مکانیکی، کنترل کننده و رایانه)، مطابق بازوی انسان وظیفه نزدیک شدن به میوه را انجام می دهد. بازوی مکانیکی مفصلی با 5 درجه آزادی ای که به طور گسترده برای مونتاژ قطعات در یک کارخانه استفاده می شود؛ انتخاب شده است. به علاوه، واحد عملگر نهایی (عملگر نهایی و برد ورودی خروجی)، مطابق دست انسان وظیفه چیدن میوه را انجام می دهد. دوربین CCD در مرکز عملگر نهایی متصل شده است. اجزای سیستم به شبکه هم متصل شده اند.
دیاگرام شماتیک سیستم برداشت رباتیک
نمایش کلی سیستم برداشت رباتیک
الگوریتم ماشین بیناییالگوریتم ماشین بینایی برای کشف میوه بادنجان بر اساس مشخصات رنگ و خصایص ریختی پایه ریزی شده است. شکل 4 طرز کار پردازش تصویر را نشان می دهد. پیش از هر کار دیگری، تصویر اصلی (شکل 4-a) گرفته شد، و پیکسل های سطح پایین خاکستری با استفاده از مشخصات رنگی که توسط آن روشنی میوه به صورت نسبتاً کم با روشنی باقی قطعات مقایسه میشود، بخش بخش شد (شکل 4-b). در اینجا، چون که تعدادی از قطعات برگ ها و ساقه ها می توانست با اشتباه در این پروسه کشف شود، خصایص ریختی بادنجان ها استفاده شد. مختصراً، بخش طولانی عمودی به همان اندازه قطعه میوه شناسایی شد. بنابراین، تصویر بخش بندی شده به صورت عمودی با یک عمل منطقی (AND) با 2 الگو (شکل 4-c، d) تقسیم بندی شده است و به صورت عمودی مورد های تقسیم بندی شده (شکل 4-e، f) بدست آمدند. موارد با یک سطح حداکثر (شکل 4-g، h) خارج از موارد تقسیم بندی شده عمودی برای حذف موارد کوچک باقی مانده اند. یک عمل منطقی (AND) میان این دو تصویر انجام می شود، چنانکه چند خط دراز بدست می آید (شکل 4-i). در آخر این خطوط توسط یک عمل آماسی به هم متصل می شوند، و مورد انتهایی به عنوان میوه شناسایی می شود (شکل 4-j).
شکل 5 مثال هایی از پردازش تصویر را نشان می دهد. این مورد تأیید است که الگوریتم می تواند تحت شرایط متفاوت نور استفاده شود، هر چند الگوریتم یک تکه از میوه را در مورد حالات نور مستقیم خورشید کشف کرده است.
ماشین بینایی برای کشف بادنجان (a): تصویر اصلی، (b): پیکسل های سطح پایین خاکستری، (c): الگوی اول، (d): الگوی دوم (e): تقسیم بندی عمودی تصویر با استفاده از الگوی اول، (f): تقسیم بندی عمودی تصویر با استفاده از الگوی دوم، (g): حداکثر سطح مورد، (h): حداکثر سطح مورد، (i): خطوط طویل عمودی، (j): میوه کشف شده
نمونه های پردازش تصویر تحت تابش نور طبیعی خورشید (فاصله دوربین: 400 میلی متر)
دیاگرام شماتیک از کنترل بازوی مکانیکی
راهنمای بازوی مکانیکی به سمت میوه توسط منطق فازی
بعد از کشف میوه توسط واحد ماشین بینایی، بازوی مکانیکی با استفاده از اطلاعات ماشین بینایی به میوه نزدیک می شود. یک منطق فازی برای راهنمایی بازو اختیار شد، از آنجایی که الگوریتم ماشین بینایی همیشه تمام قسمت های میوه را شناسایی نخواهد کرد. بنابر این مدل کنترل فازی پس خور بصری نشان داده شده در شکل 6، برای تعیین حرکت رو به جلو، حرکت عمودی و زاویه چرخش بازوی مکانیکی مبنی بر موقعیت کشف میوه در قاب تصویر طراحی شد. نتیجتاً، انتهای بازوی مکانیکی آنچنانکه ناحیه هدف (بخشی حول حداکثر قطر) در مرکز قاب تصویر مکان یابی شده است، به میوه می رسد. سطح میوه کشف شده با رسیدن عملگر نهایی افزایش یافته است. زمانی که سطح 70 درصد پیکسل های تصویر را اشغال کرد، سیستم نزدیک شدن را طبق رسیدن بازوی مکانیکی به میوه متوقف می کند.
عملگر نهایی برداشت
عملگر نهایی برداشت یکی از مهمترین ابزار برای برداشتن میوه بعد از رسیدن انتهای بازو به میوه است. این متشکل از یک مکانیزم چنگال میوه، یک مکانیزم تشخیص اندازه، و یک مکانیزم ساقه بر است. شکل 7 نمایش عمومی از عملگر نهایی را نشان می دهد. مکانیزم چنگال می تواند به صورت امن میوه را با چهار لاستیک محرک و دو تشک مکشی نگه دارد. مکانیزم تشخیص می تواند یک میوه را با اندازه ای بین 125 تا 185 میلی متر مبنی بر فاصله میان سنسور فتوالکتریک برای کشف قله میوه و میله های راهنما برای کشف پایه میوه انتخاب کند. مکانیزم برش، به علاوه، قادر به بریدن ساقه محکم است. همه مکانیزم ها با 4/0 مگا پاسکال هوای فشرده به حرکت می افتند.
پروسه برداشت
نرم افزار مجتمع، برای انجام عمل برداشت با ترکیب وظیفه ای اجزای سیستم توسعه داده شد. پروسه برداشت به این قرار است: ابتدا، انتهای بازوی مکانیکی به صورت عمودی، افقی و در جهت جلو سو توسط مدل کنترل فازی پس خور بصری کنترل می شود. بعد از اینکه انتهای بازوی مکانیکی به میوه رسید، سیستم شروع به وظیفه چیدن می کند. سنسور فتو الکتریک، متصل در زیر عملگر نهایی، برای تشخیص اینکه آیا این قله میوه را تشخیص داده است، بررسی می شود. عملگر نهایی سپس به سمت پایین یا بالا حرکت میکند تا قله میوه در جلوی سنسور فتو الکتریک بیاید و میوه چنگ زده شود. بازوی مکانیکی میوه را در یک زاویه 30 درجه با مرکز پایه میوه برای جدا کردن میوه از برگ های همجوار بلند میکند. میله های راهنما بسته می شوند و به سمت بالا کشو می شوند. زمانی که میله های راهنما به پایه میوه می رسند، آنها کشو شده به سمت بالا را متوقف می کنند. قیچی ها برای برداشت، نزدیک شده به ساقه جهت قطع استفاده می شوند. در انتها، میوه به یک حامل که در نزدیکی بازوی مکانیکی قرار گرفته است منتقل می شوند.
آزمایش برداشت مقدماتی
مواد و روش ها
آزمایش برداشت مقدماتی ای در آزمایشگاه با 40 نمونه برای تخمین کارایی بر حسب نسبت برداشت موفق، موقعیت برش، و مدت زمان اجرا هدایت می شود.
نمایش عمومی از عملگر نهایی برداشت
صحنه برداشت با عملگر نهایی
آزمایش مقدماتی برداشت
مدت زمان اجرا هر وظیفه در عمل برداشت مقدماتی
بادنجان ها (واریته: سنریو-2) کاشته شده در گلدان، در یک ارتفاع یک متر هرس شده و در پرورش «V» شکل قرار گرفته اند. میوه نمونه با یک اندازه 125 تا 185 میلی متر در مسافت 300 میلی متری از موقعیت اصلی بازوی مکانیکی قرار گرفته اند و نرم افزار تجمعی استفاده شده است. اینجا، برگ ها در جلوی میوه برای جلوگیری از مزاحمت مشاهدات بصری حذف شده اند . نور افشانی حول میوه حدود 450 تا 600 لوکس بود.
کارایی سیستم روباتیک
صحنه برداشت برای بادنجان با عملگر نهایی در شکل 8 و نتایج آزمایش برداشت مقدماتی در جدول 1 نشان داده شده است. سیستم می تواند 25 نمونه از 40 نمونه را با نسبت برداشت موفق 5/62 درصد برداشت کند. هرچند، در 5 نمونه، سیستم ساقه میوه را می برد (برش عمیق) و در 9 نمونه اندازه میوه بد تشخیص داده شده اند. این ناتوانی بیشتر به سبب کشف ناموفقیت پایه میوه بود که باید با استفاده از سنسوری نوری بهبود یابد. به علاوه، ناتوانی در رسیدن در یک نمونه رخ داد به دلیل اینست که الگوریتم ماشین بینایی میوه را در حین رسیدن کشف نکرد.
میانگین موقعیت برش ساقه 3/9 میلی متر بیشتر از پایه میوه در نمونه های با موفقیت برداشته شده بود. موقعیت برش به طور گسترده با جهت ساقه و قطر پایه میوه متفاوت بود. چون که بادنجان ها عموماً با یک ساقه کمتر از 5 میلی متر حمل می شدند، برای نیروی انسانی برش دوباره ساقه، نظر به استفاده مناسب سیستم در آینده، لازم خواهد بود.
به علاوه، جدول 2 زمان اجرای هر وظیفه در عمل برداشت مقدماتی برای نمونه های با موفقیت برداشت شده را نشان می دهد. یافته شد که سیستم برداشت رباتیک نیازمند 1/64 ثانیه برای برداشت بادنجان است. مخصوصاً، زمان اجرای تشخیص اندازه میوه، برای رسیدن و کشف قله میوه که اضافه شده است، 1/46 ثانیه بود و برای بیشترین زمان حساب شده است. سرعت بخشی این وظیفه شاید برای یک بهبودی عمده و با ارزش در کارایی سوق دهد. به علاوه، بیشتر مطالعات برای استفاده مفید سیستم شامل کنترل با یک وسیله سیار، افزایش تراکم سیستم و هم آهنگی با نیروی انسانی باید انجام شود.
نتیجه
عمل برداشت برای بادنجان ها پیچیده و نیاز به مقدار زمان زیادی دارد. طبق یک مطالعه اصولی برای مکانیزه کردن، سیستم برداشت رباتیک برای بادنجان با استفاده از تکنولوژی پیشرفته توسعه داده شده است. سیستم متشکل از یک واحد ماشین بینایی، یک واحد کنترل بازوی مکانیکی و یک واحد عملگر نهایی توسعه داده شده و می تواند به صورت خودکار عمل برداشت مقدماتی یعنی وظایف شناسایی، رسیدن و چیدن را اجرا کند. نسبت کارایی برداشت موقت 5/62 درصد است، اگر چه عملگر نهایی در یک موقعیت کمی مرتفع از پایه میوه ساقه را می برد. زمان اجرا برای برداشت یک بادنجان 1/64 ثانیه است. در نتیجه، طراحی اصولی برداشت رباتیک برای بادنجان ها توسعه داده شده و باید در توسعه تکنیک ها برای تولید مناسب سبزیجات شرکت داشته باشد.


اگه اطلاعات بینایی ماشین این ربات رو به همراه کد برنامه نویسی شو دارین بی زحمت ایمیل کنید ممنون یا بزارین تو سایت
متشکر