یک سیستم ماشین بینایی آزمایشی برای سورتینگ تمبر هندی
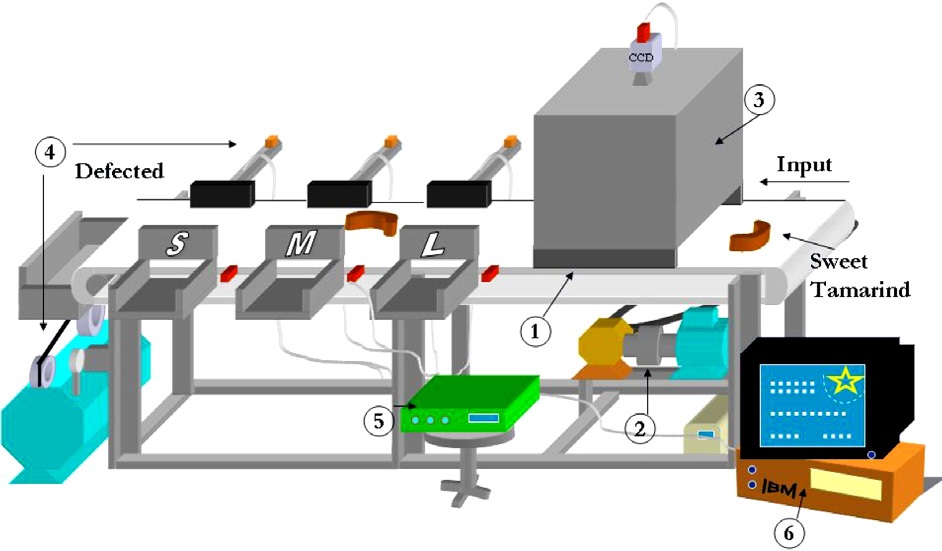
دستگاه شامل نقاله و لوازم آن، منابع نوری و سنسور های نوری، جدا کننده های بادی، و رایانه و میکرو کنترلر می باشد.
در حین حرکت نقاله غلاف های تمبر هندی از یک فتو سنسور متشکل از یک دیود لیزری (یک نیمه هادی کوچک که وقتی جریان الکتریکی از آن میگذرد تولید اشعه می کند، مورد استفاده در فیبر نوری، چاپگر های لیزری، دستگاه کنترل از راه دور و غیره) و یک فوتو ترانزیستور (نیمه هادی حالت جامد که با جذب نور حفره هایی در آن ایجاد می شود و این جریان توسط عمل ترانزیستور تا چندین برابر تشدید می شود.) سیگنال تولید شده را به میکرو کنترلر می فرستد و این سیگنال پردازش شده موجبات دستور رایانه برای عکس برداری را فراهم می کند.
بعد از پردازش تصویر، اطلاعات برای میکرو کنترلر، برای به کار انداختن جدا کننده های بادی فرستاده می شود. از توضیحات مقاله اینگونه برداشت می شود که با عبور غلاف از جلوی سنسور هایی که در موقعیت جک های بادی قرار گرفته است، جک بادی مربوط باید کار کند. یعنی پس از تشخیص نوع محصول، داده پردازش شده به میکرو کنترلر فرستاده می شود. یعنی به میکرو کنترلر دستور حرکت جک معینی داده می شود.
اما میکرو کنترلر منتظر می ماند تا سیگنالی از
سنسور نوری قبل از جک دریافت شود. به محض دریافت سیگنال دستور عملکرد جک را
می فرستد و جک عمل می کند. همین روند را میتوان در دستگاه به کار برد.
یعنی در ابتدا با عبور گوجه از جلوی سنسور اول سیگنالی به میکرو کنترلر
فرستاده می شود. میکرو کنترلر آن را به رایانه می فرستد و رایانه طبق آن
دستور عکسبرداری می دهد؛ سپس عکس را پردازش کرده و داده حاصل در یک آرایه
چند تایی قرار میدهد. این آرایه به تعداد مشخصی پر می شود.
به
محض رسیدن گوجه به سنسور نوری دوم سیگنالی از سنسور به میکرو کنترلر و سپس
به رایانه منتقل می شود. این سیگنال در واقع در خواست حالت دریچه را از
رایانه می کند.
رایانه نیز از ابتدای آرایه نوع های مشخص شده را به میکرو کنترلر فرستاده و میکرو کنترلر دستور حالت خاص را به دریچه می دهد. یعنی یا دریچه به حالت قبلی باقی مانده و یا حالت دوم را به خود می گیرد. قرار دادن آرایه بدین منظور است که اولاً بلافاصله بعد از عکسبرداری گوجه به دریچه نرسیده است. ثانیاً تعداد گوجه های عبوری از مرحله عکس برداری و پردازش تا رسیدن به دریچه مشخص نیست و اطلاعات آنها در آرایه قرار گرفته تا در موقع خاص اطلاعات از آرایه استخراج و استفاده شود.
در این مقاله برای تشخیص فاصله ای استاندارد برای دوربین روش خاصی بکار برده شده است. مقاله بیان داشته است که طبق پیشنهاد تئوری نور - بیان شده در کتاب «فیزیک برای دانشمندان و مهندسان با فیزیک مدرن » - فاصله جسم مطلوب می تواند نتیجه و مشتق از فاصله کانونی تعیین شده دوربین و فاصله مطلوب تصویر باشد.دوربین روی یک سطح فلزی که قابلیت تنظیم ارتفاع را دارد نصب شده است. یک تکه کاغذ با ابعاد طولی و عرضی 2 سانتی متر بروی پلاتفورم زیر دوربین و در خط مستقیم لنز آن قرار داده شد. در فاز اول، دوربین در 35 سانتی متری بالای کاغذ نصب شد. تصویری از کاغذ تهیه، پردازش و ذخیره شد. منظور از پردازش این است که اندازه ابعاد آن تشخیص داده شده است. این کار برای فواصل 37، 40، 44، 47 و 49 سانتی متری و ابعاد کاغذ 3، 4، 5، 7، 9 سانتی متری هم انجام شد. درصد خطای خواندن سیستم طبق رابطه زیر محاسبه شد.
(100 × (ابعاد حقیقی / مقدار خوانده شده)) - ابعاد حقیقی کاغذ
سرعت تسمه را برای تغذیه بهتر و راحت تر دستی، انتخاب کرده است. می توان سرعت ها و فواصل میوه را امتحان کرد و درصد خطا را برای هر کدام محاسبه کرد.
